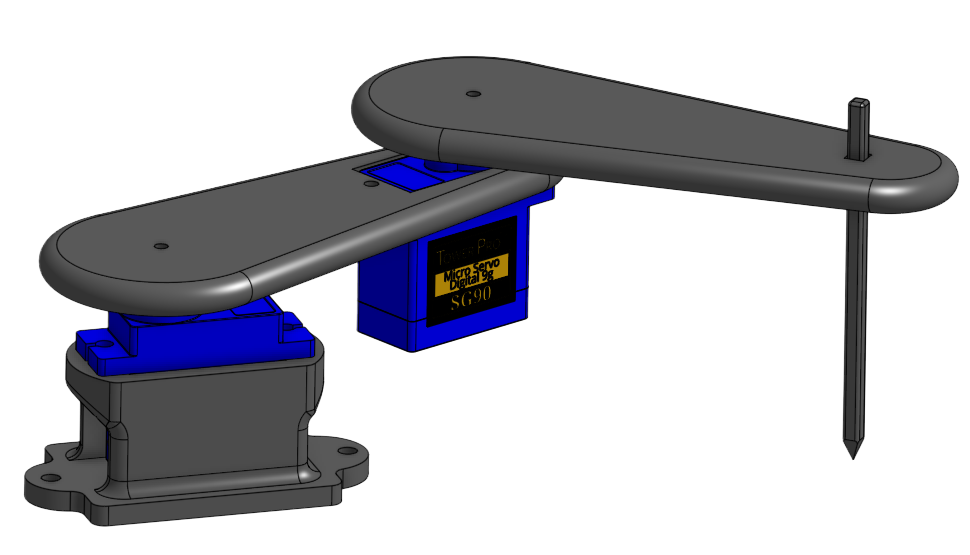
2DOF Robotic Arm
Build a real robotic arm. Understand how it moves — from joint angles to inverse kinematics — by deriving every equation yourself.
- 60-page illustrated guidebook — built from first principles, no black boxes
- Real 2DOF robotic arm — not a simulation
- Control via serial monitor using ESP8266 NodeMCU
- All components included — nothing extra to buy
- Covers: robotics foundations, DH parameters, forward kinematics, inverse kinematics, assembly, wiring, and programming
- 120 mm reach across two 60 mm links — beginner to intermediate level
- For Class 11–12 students, UG engineers, robotics beginners, and makers
- Made in India
Most people who build robots follow instructions. They wire things up, upload some code, watch it move — and never stop to ask why.
The 2DOF Robotic Arm is built around that question. The guidebook starts from what a robot actually is and builds up from there — links, joints, degrees of freedom, DH parameters, forward and inverse kinematics — every concept derived from first principles, no black boxes. Then you build the arm, wire the circuit, upload the code, and command it through the serial monitor, watching the mathematics come alive in a physical arm moving to exactly the right spot.
By the end, you will not just have built a robot kit. You will understand every reason why it works — and finish with an ORCA Robotics Certificate of Completion to show for it.
- Class 11–12 students who want to understand how robots actually move, not just build one from a manual
- Engineering students (Mech, ECE, CS, Robotics) building a real foundation in kinematics and embedded systems
- Hobbyists who have seen robotic arms online and want to understand the mathematics behind them
- Makers and tinkerers ready to go beyond tutorials and think from first principles
- Lab coordinators looking for a self-contained, structured robotics project kit
From what a robot fundamentally is, through the mathematics of motion, all the way into assembly, wiring, and code. Every concept is derived from first principles — no black boxes.
- What a robot is
- Degrees of freedom
- Links and joints
- DH parameters
- Forward kinematics
- Inverse kinematics
- Assembly
- Circuit connections
- Programming setup
- Programming guide
- Code walkthrough
Everything required to assemble and control the arm. No additional purchases needed.
| Component | Qty |
| Complete Guidebook (physical) | 1 |
| SG90 Servo Motor | 2 |
| ESP8266 NodeMCU | 1 |
| Robot Arms | 2 |
| Robot Base | 1 |
| End Effector | 1 |
| 5V DC Power Supply | 1 |
| DC Jack | 1 |
| Breadboard | 1 |
| Jumper Wires | 10 |
| USB Cable | 1 |
| Robot Control Program | Included |
-
Do I need prior robotics or coding experience?
No. The guidebook starts from what a robot actually is and builds up from there through the mathematics and into the build. Basic familiarity with a computer is enough to get started.
-
Does the kit come pre-assembled?
No — and that's intentional. Assembling the arm yourself is part of how the learning happens. The guidebook walks you through every step with images.
-
What software do I need?
Arduino IDE, which is free to download. The control program is included — you flash it to the NodeMCU via USB.
-
What does the serial monitor control do?
You type X and Y coordinates into the Arduino IDE's serial monitor, the arm runs inverse kinematics, calculates the required joint angles, and moves to that position. You can also switch between elbow-up and elbow-down configurations and control movement speed.
-
What mathematics does the guidebook cover?
Forward kinematics (finding where the end effector is given joint angles) and inverse kinematics (finding the joint angles needed to reach a target point), both derived from first principles using trigonometry and the cosine rule. DH parameters are also covered in full.
-
How do I contact you?
Instagram: @orca.robotics | Email: info@orcarobotics.in